Расчет движения планет. Современный взгляд на движение планет Солнечной системы. Гелиодинамическая система. От Кеплера до Ньютона
Инструкция . Для онлайн решения необходимо выбрать вид уравнения и задать размерность соответствующих матриц.
где А, В, С - задаваемые матрицы, Х - искомая матрица. Матричные уравнения вида (1), (2) и (3) решаются через обратную матрицу A -1 . Если задано выражение A·X - B = C , то необходимо, сначала сложить матрицы C + B , и находить решение для выражения A·X = D , где D = C + B (). Если задано выражение A*X = B 2 , то предварительно матрицу B надо возвести в квадрат . Рекомендуется также ознакомиться с основными действиями над матрицами .Пример №1
. Задание
. Найти решение матричного уравнения
Решение
. Обозначим:
Тогда матричное уравнение запишется в виде: A·X·B = C.
Определитель матрицы А равен detA=-1
Так как A невырожденная матрица, то существует обратная матрица A -1 . Умножим слева обе части уравнения на A -1:Умножаем обе части этого равенства слева на A -1 и справа на B -1: A -1 ·A·X·B·B -1 = A -1 ·C·B -1 . Так как A·A -1 = B·B -1 = E и E·X = X·E = X, то X = A -1 ·C·B -1
Обратная матрица A -1: ![]()
Найдем обратную матрицу B -1 .
Транспонированная матрица B T:
Обратная матрица B -1: ![]()
Матрицу X ищем по формуле: X = A -1 ·C·B -1
![]()
Ответ:
Пример №2
. Задание.
Решить матричное уравнение ![]()
Решение
. Обозначим:
Тогда матричное уравнение запишется в виде: A·X = B.
Определитель матрицы А равен detA=0
Так как A вырожденная матрица (определитель равен 0), следовательно уравнение решения не имеет.
Пример №3
. Задание. Найти решение матричного уравнения

Решение
. Обозначим:
Тогда матричное уравнение запишется в виде: X·A = B.
Определитель матрицы А равен detA=-60
Так как A невырожденная матрица, то существует обратная матрица A -1 . Умножим справа обе части уравнения на A -1: X·A·A -1 = B·A -1 , откуда находим, что X = B·A -1
Найдем обратную матрицу A -1 .
Транспонированная матрица A T: 
Обратная матрица A -1: 
Матрицу X ищем по формуле: X = B·A -1

Ответ: >
1)
Рассмотрим сначала действительные матрицы. Предположим, что из матрицы $%A$% извлекается корень, т.е. существует матрица $%B$% такая, что $%B \cdot B=A$%. Предположим также, что матрица $%B$% может быть приведена к диагональному виду, т.е. существует матрица $%S$% такая что $%S^{-1}BS=B"$%, где $%B"$%- диагональная матрица. Из равенств $%B"B"=S^{-1}BSS^{-1}BS=S^{-1}BBS=S^{-1}AS$% следует, что $%A"=S^{-1}AS$% - тоже диагональная матрица, т.е. матрицы $%A$% и $%B$% приводятся к диагональному виду одним и тем же преобразованием. Т.к. элементы штрихованных матриц - это собственные значения нештрихованных, то из приведенных рассуждений вытекают следующие выводы.
1.1)Если матрица $%A$% является симметричной положительно определенной матрицей, то из нее извлекается корень в виде действительной матрицы.
1.2) Алгоритм вычисления корня из такой матрицы следующий: решить задачу на собственные значения, извлечь из собственных значений корни, составить из них диагональную матрицу, применить к ней преобразование, обратное к преобразованию, переводящему матрицу $%A$% к диагональному виду.
1.3) Количество различных матриц $%B$% равно $%2^n$%, т.к. для каждого собственного значения есть 2 значения корня - положительное и отрицательное.
2) Для комплексной матрицы рассуждения останутся в силе, если заменить симметричность на унитарность. Требование положительной определенности при этом, естественно, снимется.
3)
Решение для общего случая.
Предположим, что преобразование $%S$% приводит матрицу $%B$% не к диагональному, а к верхнему треугольному виду, т.е. матрица $%B"$% является верхней треугольной. Такое преобразование существует для любой квадратной матрицы. Легко убедиться, что матрица $%A"$% при этом тоже получится верхней треугольной, причем, диагональные элементы матрицы $%A"$% будут квадратами соответствующих диагональных элементов матрицы $%B"$%. Это позволяет найти все диагональные элементы матрицы $%B"$% извлечением корня из диагональных элементов матрицы $%A"$%, а затем по цепочке найти и все остальные элементы матрицы $%B"$%. Отсюда получаются следующие выводы.
3.1) Из любой комплексной матрицы извлекается корень, в общем случае таких корней $%2^n$%, но среди них могут быть совпадающие (кратные).
3.2) Алгоритм вычисления корней следующий: преобразовать матрицу $%A$% к верхнему треугольному виду, найти матрицу $%B"$% по сформулированному алгоритму и сделать обратное преобразование.
3.3) Необходимым и достаточным условием вещественности корней из вещественной матрицы является не отрицательность диагональных элементов после преобразования матрицы к треугольному виду. Не отрицательность детерминанта является условием необходимым, но недостаточным.
Дополнение 1 (ответ на комментарий) . Вы имели в виду "к треугольному виду". Вообще, в пп. 1, 2 все абсолютно четко, а над п.3 нужно, видимо, еще подумать. Дело в том, что метод Гаусса может не сводиться к преобразованию $%S^{-1}AS$%, а на этом основано доказательство. Т.е. доказательство применимо только к тем матрицам, которые приводятся к треугольному виду преобразованием $%S^{-1}AS$%.
Дополнение 2 . Похоже, в п.3 в целом все правильно, только нужно использовать преобразование матрицы $%A$% к Жордановой форме - для этого преобразования всегда есть матрица, получающаяся из решения задачи на собственные значения. Проблема в том, что квадрат Жордановой матрицы не является Жордановой матрицей (хотя является треугольной и даже двухдиагональной). Строгое обоснование алгоритма требует доказательства следующей теоремы: "Если $%A"=B"^2$% и $%A"$%- Жорданова матрица, то $%B"$%- треугольная матрица". Утверждение кажется верным, но как доказать - пока не знаю.
>Всем привет!!! Существует ли формула, по которой из матрицы можно убрать масштабирование, не зная коэффициентов масштабирования???
Сразу вспомнили полярное разложение. Что-де, матрица M представляется в виде O * P. Где O ортогональная, а P положительно определенная, симметричная – то есть матрица сжатия или растяжения. Вот матрицу O мы и возьмем.
Встает вопрос. А если раскладывать M с другой стороны, то получим P’ * O’. Разложение в другом порядке, с другими априори матричками. Почему бы не взять O’? Я мучался минут пять вопросом, пока не вспомнил, как ставил студентам незачет по этому поводу. Матрица O’ на самом деле совпадает с матрицей O. Если вы недавно закончили университет или еще учитесь – можете даже попытаться доказать сей факт.
Итак, полярное разложение:
Для нахождения положительного квадратного корня из матрицы в позитивной науке предлагается посчитать собственные числа. Для каждого собственного числа найти собственное подространство, потом аккуратно изготовить собственно квадратный корень из оператора.
Я как представил, что получится для матрицы, близкой к единичной, аж вздрогнул. Все умрет на неточностях флоата, ранги у матриц съедут – полный коллапс обещает быть.
А почему бы благородным донам не попробовать итерации, которые божествены, как известно?
Вот, корень из числа ищется методом Ньютона. Последовательность a_{i+1} = 0.5 * (a_i + x / a_i); гордо сходится к квадратному корню из x. Для пробы взял чью-то библиотечку про mat3x3 и наклепал матричный аналог.
Прямой аналог метода Ньютона шустро сходится за 3-4 итерации, тесты проходят как легкий ветерок. Получается полярное разложение для матриц, работоспособность алгоритма очевидна из элементарной спектральной теории операторов. Очевидна после получаса скрипа мозгом.
Итак, полярное разложение мы нашли. Вопрос – зачем? И тут я вынужден перейти к основному поинту своего доклада. Учение – зло. Время, которые вы потратили на вспоминание спектральной теории операторов, успешно потрачено впустую.
Разложение Scale Shear Rotate ищется на раз. Применяем процесс ортогонализации и ортонормализации к матрице. По столбцам. Получаем отличную матрицу. И чем результат будет хуже? Да ничем!
Увидел я пост с кодом на паскале, который и считает это самое Scale Shear Rotate разложение, и внезапно понял, что у меня нет аргументов за полярное разложение. Которое требует хрен знает какой вычислительной техники.
Конечно, есть мелкие возражения, почти придирки. К примеру, что tangent space проще считать ортонормальным. Вычислительно проще. Обычно считают dPosition/du, нормаль, а третий вектор берут перпендикулярным к этой паре. Ясно, что метод несимметричный относительно текстурных координат, какая из них первая, какая вторая – совершенно непонятно. Вроде бы правильно применить полярное разложение к матрице локального преобразования.
Может, заметите вы разницу между “правильным” полярным разложением и “неправильным” процессом ортогонализации по столбцам. Скорее не заметите. И уж точно картинка не станет лучше.
P.S. А вот еще анимации хранить в Scale Shear Rotate очень круто. Три вектора, один кватернион. Shear почти всегда 0, Scale почти всегда 1, константные треки можно выкинуть. А там где неконстантные треки – как-нить выжать за счет специализации шаблона. Или еще чего.
Приведенный анализ очень подходит к движению осциллирующей пружинки с грузиком, но можно ли таким же путем вычислять движение планеты вокруг Солнца? Давайте посмотрим, можно ли при некоторых приближениях получить эллиптическую орбиту. Предположим, что Солнце бесконечно тяжелое в том смысле, что его движение не будет приниматься в расчет.
Допустим, что в известной точке планета начала свое движение и имеет определенную скорость. Она движется вокруг Солнца но какой-то кривой, и мы попытаемся определить с помощью уравнений движения Ньютона и его же закона всемирного тяготения, что это за кривая. Как это сделать? В некоторый момент времени планета находится в каком-то определенном месте, на расстоянии от Солнца; в этом случае известно, что на нее действует сила, направленная по прямой к Солнцу, которая, согласно закону тяготения, равна определенной постоянной, умноженной на произведение масс планеты и Солнца и деленной на квадрат расстояния между ними. Чтобы рассуждать дальше, нужно выяснить, какое ускорение вызывает эта сила.
Однако в отличие от предыдущей задачи нам потребуются теперь компоненты ускорения в двух направлениях, которые мы назовем и . Положение планеты в данный момент будет определяться координатами и , поскольку третья координата всегда равна нулю.
Действительно, координатная плоскость выбрана нами таким образом, что компоненты как силы, так и начальной скорости равны нулю, а поэтому нет никаких причин, которые бы заставили планету выйти из этой плоскости. Сила при этом будет направлена по линии, соединяющей планету с Солнцем, как это показано на фиг. 9.5.

Фигура 9.5. Сила притяжения, действующая на планету
Из этого рисунка видно, что горизонтальная компонента силы так относится к полной ее величине, как координата относится к расстоянию . Это сразу следует из подобия треугольников. Кроме того, если положительна, то отрицательна, и наоборот.
Таким
образом, ![]() ,
или и
соответственно
,
или и
соответственно ![]() .
Теперь можно воспользоваться динамическими законами (9.7) и написать, что или компонента
ускорения, умноженная на массу планеты, равна соответственно или компоненте силы:
.
Теперь можно воспользоваться динамическими законами (9.7) и написать, что или компонента
ускорения, умноженная на массу планеты, равна соответственно или компоненте силы:
 (9.17)
(9.17)
Это именно та система уравнений, которую мы должны решить. Для того чтобы упростить вычисления, предположим, что либо единицы измерения времени или массы выбраны соответствующим образом, либо нам просто повезло, словом, получилось так, что . Для нашего случая предположим, что в начальный момент планета находилась в точке с координатами и , а скорость ее в этот момент направлена параллельно оси и равна . Как же в этом случае делаются расчеты? Снова составляется таблица со столбцами для времени , координаты компонент скорости и ускорения . Затем идут отделенные чертой три колонки: для координаты компонент скорости и ускорения. Однако, для того чтобы подсчитать ускорения, мы должны воспользоваться уравнением (9.17), согласно которому его компоненты равны и , а . Так что, получив и , мы должны где-то в сторонке провести небольшие вычисления - извлечь квадратный корень из суммы квадратов и получить расстояние. Удобно также отдельно вычислить и .
После этого все готово, чтобы определить компоненты ускорения. Всю эту работу можно сильно облегчить, если пользоваться таблицами квадратов, кубов и обратных величин. На нашу долю останется тогда только умножение на , которое легко выполняется на логарифмической линейке.
Перейдем к дальнейшему. Возьмем интервал времени . В начальный момент

Отсюда находим

После
этого можно вычислять компоненты ![]() :
:

Таблица 9.2 Определение пути планеты вокруг солнца
Решение
системы уравнений: ![]() При
При
Ось пересекается в момент , период обращения равен . Орбита пересекается с осью при , длина главной полуоси равна. Предсказываемое время полуоборота равно .
|
А теперь начнем наш основной расчет:
В результате мы получим числа, приведенные в табл. 9.2, где приблизительно за 20 шагов прослежена половина пути нашей планеты вокруг Солнца. На фиг. 9.6 отложены координаты планеты и , приведенные в табл. 9.2. Точки представляют собой последовательные положения планеты через каждую десятую долю выбранной нами единицы времени. Видно, что сначала она двигалась быстро, а затем - все медленней и медленней. Видна также и форма кривой движения планеты. Итак, вы теперь знаете, как реально можно вычислять движение планет! компонента силы, действующая на, за исключением, конечно, . Таким образом, чтобы решить это уравнение, нужно лишь значительно увеличить количество столбцов в нашей таблице. Для движения Юпитера понадобится девять столбцов, для Сатурна - тоже девять и т. д. Если нам заданы все начальные положения и скорости, то из уравнения (9.18) можно подсчитать все ускорения, вычислив, конечно, предварительно по формуле (9.19) все расстояния . А сколько же времени потребуется на все эти вычисления? Если вы будете делать их сами дома, то очень много! Однако сейчас уже имеются машины, неимоверно быстро выполняющие все арифметические расчеты. Сложение, например, такая машина выполняет за , т. е. за одну миллионную долю секунды, а умножение - за . Так что если один цикл расчетов состоит из 30 операций умножения, то это займет всего лишь , или за
Фигура 9.6 График движения планеты вокруг Солнца. Итак, в начале этой главы для вас были загадкой движения грузика на пружинке, однако теперь вооруженные таким мощным орудием, как законы Ньютона, вы можете вычислять не только такие простые явления, как качание грузика, но и неимоверно сложные движения планет, причем с любой желаемой точностью! Нужна только машина, знающая арифметику. |


Еще в стародавние времена ученые мужи начали понимать, что не Солнце вращается вокруг нашей планеты, а все происходит с точностью наоборот. Точку в этом спорном для человечества факте поставил Николай Коперник. Польский астроном создал свою гелиоцентрическую систему, в которой убедительно доказал, что Земля не является центром Вселенной, а все планеты, по его твердому убеждению, вращаются по орбитам вокруг Солнца. Работа польского ученого «О вращении небесных сфер», была издана в немецком Нюрнберге в 1543 году.
![]()
Представления о том, как расположены планеты на небосводе первым в своем трактате «Великое математическое построение по астрономии», высказал древнегреческий астроном Птолемей. Он первым предположил, что они совершают свои движения по кругу. Но Птолемей ошибочно считал, что все планеты, а также Луна и Солнце движутся вокруг Земли. До работы Коперника его трактат считался общепринятым как в арабском, так и западном мире.
От Браге до Кеплера
После смерти Коперника его труды продолжил датчанин Тихо Браге. Астроном, являющийся весьма состоятельным человеком, оборудовал принадлежащий ему остров, внушительными бронзовыми кругами, на которые наносил результаты наблюдения за небесными телами. Результаты, полученные Браге, помогли в исследовании математику Иоганну Кеплеру. Движение планет Солнечной системы именно немец систематизировал и вывел три своих знаменитых закона.
От Кеплера до Ньютона
Кеплер впервые доказал, что все 6 известных к тому времени планет двигаются вокруг Солнца не по кругу, а по эллипсам. Англичанин Исаак Ньютон, открыв закон всемирного тяготения, существенно продвинул представления человечества об эллиптических орбитах небесных тел. Его объяснения, что приливы и отливы на Земле происходят под влиянием Луны, оказались убедительными для научного мира.
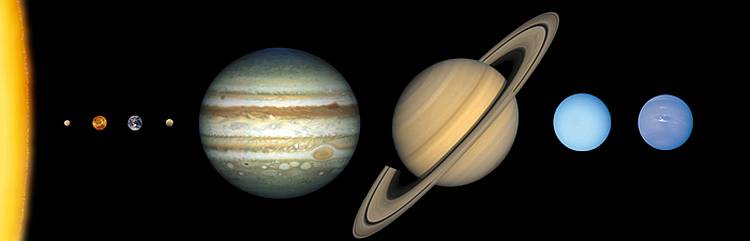
Вокруг Солнца

Сравнительные размеры крупнейших спутников Солнечной системы и планет Земной группы.
Срок, за который планеты совершают полный оборот вокруг Солнца, естественно различный. У Меркурия, самой ближней к звезде, он составляет 88 земных суток. Наша Земля проходит цикл за 365 дней и 6 часов. Самая крупная в Солнечной системе планета Юпитер завершает свой оборот за 11,9 земных лет. Ну а у Плутона, — наиболее удаленной от Солнца планеты оборот и вовсе составляет 247,7 года.
Следует также учесть, что все планеты в нашей Солнечной системе движутся, не вокруг светила, а вокруг так называемого центра масс. Каждая при этом, вращаясь вокруг своей оси, слегка раскачиваются (подобно юле). К тому же и сама ось может ненамного смещаться.